Something goes here about the geometric distribution of mass, symmetrically or otherwise, about a 'centre' of rotation.
Objects in three dimensions rotate around lines that pass through a centre; the most general kind of gyroscopic motion is that of a sphere because of the symmetric distribution of mass. Ideally the solid sphere (mathematically a 3-ball) should be made of something that has the same density at all points (correction at all small volumes that can be addressed from the centre, about which they can rotate--but they just have to 'be'there).
Even better gyroscopic effects are seen in a disk (with of course, a total mass M, a sum over 'a lot of smaller parts'). So you look up the radius of gyration for a disk, and it has two quite simple integrals--there are two ways a disk can 'gyrate' about its COM.
What I guess I want, is a way to determine what flips a coin from one to the other, what are the conditions; I can at least assume a semi-regular path for a coin because of the 'regular' motion, and you want some input from friction to slow the coin's upright mode and eventually flip it to "ringdown".
The question I want to answer is, when does it happen. The why is because when it flips over to one face or the other, a measurement is available. Like an eigenvalue, perhaps. No, actually.
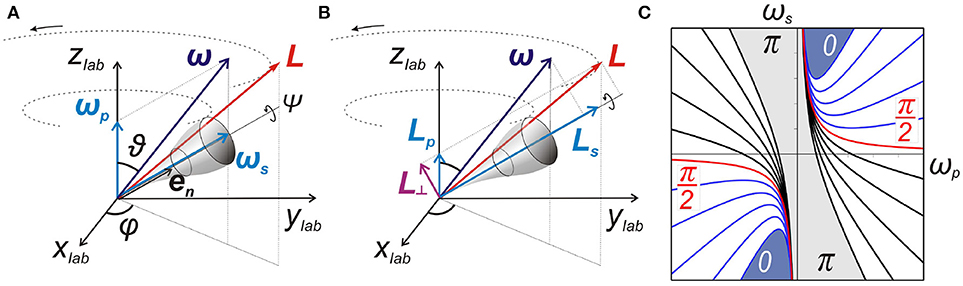
And I might have patched up the difficulty with the real values on the horizontal axis, in the C graph; here the value for the spin angular momentum is zero. But that happens in a torsion pendulum, it rotates in one direction, then the opposite direction, it changes along the horizontal line.
So that's all I need in the model, as it were. Even if the way I construct a top with gyroscopic angular momentum won't see a mode like that, in principle there is one.
If you've run out of popcorn, the next video is coming up. Lifting a 20kg weight at the end of a rod the length of your arm, with one arm sounds hard, if not shoulder-dislocating. If it's spinning though, it's a lot easier, but it aren't anti-gravity. It's a restoring force due to an applied torque.
After the easy part, you have to pay back mother nature and be careful about how you now lower it back down; there's a bit of a kick.